
����2.�������
���������ز���̖��һ���F�������x���w�l�������̖�^�����h���x���w�l�������̖�^�������Ҫ�z�y�h���x���w������Ҫ�Ӵ�Ŵ�������Ҳ���������طŴ��Ժ������������y������O�÷Ŵ�����h�����x���@�����·�OӋ���P�I���҂������Ԅ������x��������Q�@һ���}�����h���x���w���Ŵ��^�������x���w���Ŵ��^С�����OӋ�ڶ����Ŵ����r���������w���x�IJ�ͬ�������ķN��ͬ�ķŴ����D6��ڶ����Ŵ��·ԭ��D��
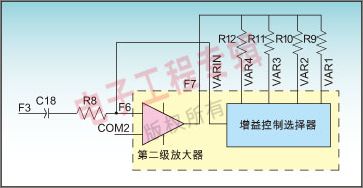
�D6���ڶ����Ŵ��·ԭ��D
�����D6�У�̓���ȵIJ��֞�оƬ�Ȳ��·��C18��R8��R9��R10��R11��R12�����Ԫ������������������x�����Ǟ����O���Ă���ͬ�ķŴ�������̽�^�����r�����˱��C�ڲ�ͬ���x�£�F7ݔ����̖�ķ��ȴ��w��ͬ�����Ը������w���x�IJ�ͬ�������ķN��ͬ�ķŴ�����С��0.6m���Ŵ���R9/R8������ֵ��3����0.6m��1.2m֮�g���Ŵ���R10/R8������ֵ��8.2��1.2m��1.8m֮�g���Ŵ���R11/R8������ֵ��10������1.8m���Ŵ���R12/R8������ֵ��12��
�����^�������_F7̎�Ľ����x���w���h���x���w����̖���ΈD��ͨ�^���ȿ��Կ��������ڲ������Ԅ������x���������FF7��̖���Ȼ�����ͬ�����C���x��3m�����wҲ�܉�z�y����
���������Y
����ͨ�^����Ľ�B���҂����Կ�������GM3101�������������κ��Ԅ������������ʹ��ϵ�y���ܳ��^�˂��y�������䷀����Ҳ���ӏ���ͬ�r������ܛ�������д��ڵIJ��������ء�����܇���_���a�́��f�����H�ܽ����_�l�����a�ɱ��������C�Ŀɿ���Ҳ���˺ܴ���ߡ������҂��������������ڵ�܇���_�y��Ć�оƬ��������������y�Ć�Ƭ�C������







