
“2.0秒生死時速”的話題是本周汽車領域熱議話題。
案例無需贅述。
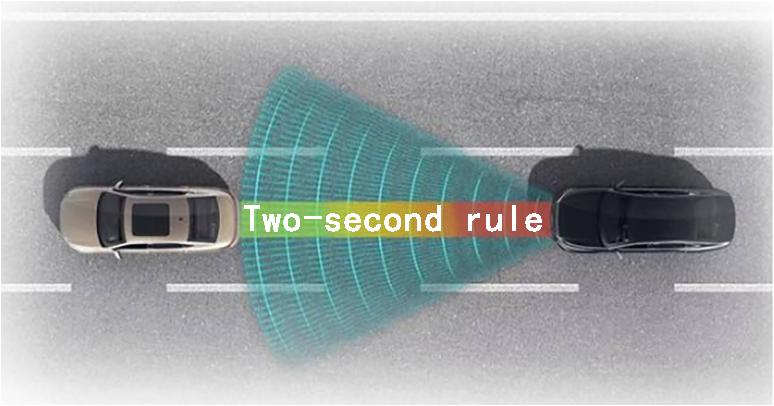
現在正在熱議的話題是兩秒時間是否足夠駕駛員去完成發現、接管、制動、轉向等一系列規避危險的駕駛操作。正確答案顯然是不夠的,因為在交通工程術語中有”兩秒定律“的名詞和概念;其概念簡單來說就是駕駛員從發現障礙物(含其他車輛)到開始有效制動的時間至少平均需要兩秒,可以這樣理解。那么從發現到完成有效制動的時間如果也是兩秒的話,司機顯然是無法有效避免碰撞發生的。
所以現在有一些網友質疑的是某些車輛的智能駕駛系統從主動偵測到障礙物,直至自動取消智駕系統并提醒駕駛員的設定,是否能保證行車安全。
然而這是一個悖論,或者直接將其定義為錯誤的提問也是可以的。
在前而非在后
“兩秒悖論”的假設前提是錯誤的,是大錯特錯的。
質疑系統設定兩秒時間不夠是可以理解的,但是這些車本就不應該或不需要甚至“兩秒緩沖。”
原因在于涉事車輛和目前在售的、所有品牌的、帶有智能駕駛系統的商品汽車全都用L2級智駕系統,對應的國內標準是2級的“組合輔助駕駛”系統。在使用該系統的時候,國標的要求是駕駛員不可以離開對車輛行駛狀況的監控,更不能不對行駛路況進行觀察!這才是2級智能駕駛系統汽車的正確使用方法。
于是假設的前提已經是錯的,如果將其視為“有條件自動駕駛”則能夠自圓其說——設定緩沖時間不論是兩秒還是五秒,其合理性都是基于“自動駕駛”四個字。
可是如果基于“組合輔助駕駛”六個字的話,那么這些車輛就根本不需要設定緩沖時間!因為遇到前方道路有障礙物的場景時,需要及時發現障礙物的角色是司機而不是汽車本身!不用對這個結論感到驚訝。
參考GB/T(國標/推薦)40429-2021·《駕駛自動化等級與劃分要素的關系》中的描述即可。
具體有:2級,組合輔助駕駛;持續的車輛橫向和縱向運動控制可由系統實現;目標和時間探測與響應,駕駛員及系統(駕駛員有限);動態駕駛任務后援,駕駛員;設計運行范圍,有限制2級,駕駛員需要執行駕駛自動化系統沒有執行的其余動態駕駛任務;監管駕駛自動化系統,并在需要時介入動態駕駛任務以及確保車輛安全;決定是否及時啟動或關閉駕駛自動化系統;在任何時候,可以立即執行全部動態駕駛任務
答案清晰明了,一目了然。

在“用戶與駕駛自動化系統的角色”里明確說明了駕駛員需要做的事情,其中最重要的兩點已經凸顯出來了——駕駛員不論在任何時候都可以(需要)立即執行全部動態駕駛任務,并且在需要時介入動態駕駛任務并確保車輛安全——這兩條的解釋說明了確保行車安全的責任不是“組合輔助駕駛系統”而是駕駛員!所以“兩秒悖論”嚴格來說已經不是悖論而是做了錯誤的預設,悖論想要自圓其說也得有合理的預設才行。

總結與分析
“兩秒悖論”實際是沒有意義的討論,而且從上述分析結論可以得出另一個結論,那就是所有將“組合輔助駕駛系統”當成自動駕駛去使用,并且過程中引發交通事故的行為責任人都是司機!雖然這樣的結論可能會讓汽車用戶們難以接受,但是這就是殘忍的客觀事實!所以現在應該明白一個什么道理了呢?
這個道理就是不要把未明確定義為“≥3級·有條件自動駕駛”的汽車當成自動駕駛汽車看待與使用,否則出現所有問題都得自負。同時車企可以摘得干干凈凈,畢竟只要發生交通事故,就算使用了智能輔助駕駛系統也是駕駛員沒有盡到“在任何時候可以立即執行全部動態駕駛任務”和“監管駕駛自動化系統并在需要時介入動態駕駛任務以確保車輛安全”的責任。
你不承擔責任誰承擔?
規則上沒有漏洞,只是車主們沒有去了解而已。
這也是至今為止沒有一例有關汽車智駕的交通事故最終會由汽車生產制造企業承擔責任的原因之一。
不要再天真了。
不過作為汽車用戶還是有一個點可以作為有力的武器,那就是回頭去找車企在新車或技術發布的時候有沒有將其定義為或使用過“智能駕駛”或“自動駕駛”的視頻、圖片資料;如果有的話,那么車企則有相應責任。
就是這樣的道理。
















 粵公網安備 44010602000157號
粵公網安備 44010602000157號
